Activity
Research Overview
Dr. Bahar's research integrates human-robot interaction, energy-efficient hardware acceleration, and secure memory systems to address critical challenges in modern computing and autonomous systems.
Research Areas
Human-Robot Interaction & Causal Reasoning
- Integration of human causal models with robot decision-making
- LLM-enhanced planning for object assembly and troubleshooting
Hardware Acceleration for Robotics
- FPGA-accelerated kernels for robot perception and planning
- Energy-efficient machine learning for autonomous systems
Secure & Reliable Computing Systems
- High-performance secure memory architectures
- Non-volatile memory design and data structures
Current Research Projects
Causal Models as a Framework for Human-Robot Interaction
Human reasoning often makes use of explicit causal models, allowing humans to explain, hypothesize, and extrapolate to different domains in uncertain scenarios. This project aims to harness the general causal reasoning abilities of the average human to guide robots in specific tasks. We explore if human mental models of objects, even when flawed, can be integrated with a collaborative robot's decision-making framework to allow it to make smarter choices for different object-related tasks such as assembly and troubleshooting. We also explore how human causal models can be strategically integrated with Large Language Models (LLMs) to improve planning outcomes under uncertainty for object assembly and troubleshooting tasks.
Funding: ONR ($925,598, June 2022-June 2026)
Collaborators: S. Sloman (co-PI)
Real-time, Energy-efficient Hardware Acceleration for Robot Applications
Autonomous Mobile Robots have shown significant promise for many real-world applications. To complete such tasks, these systems require a robust system comprising sensing, planning, and control, all of which can be very computationally expensive, affecting both runtime and energy consumption. We propose a framework for developing FPGA-accelerated kernels for robotics applications through hardware-software co-design. Our design approach exposes fine-grained parallelism and eliminates synchronization bottlenecks via deep pipelining across algorithmic stages.
Funding: NSF ($500,000, June 2021-2026)
Collaborators: R. I. Bahar (sole-PI)
High-performance Secure Memory for Heterogeneous Systems
The increasing dependence on information technology has made us more vulnerable to sophisticated computer-based attacks. To improve the trust in computing systems, data can be protected with a secure memory system, but this requires data encryption and special data structures to protect data before going out to memory, which can lead to significant performance overheads. This project investigates various approaches to improve implementation costs of secure memory in terms of runtime, hardware overhead, memory utilization, scalability, and energy consumption.
Funding: NSF ($500,000, June 2019-June 2023)
Collaborators: M. Herlihy, T. Moreshet (co-PIs)
Publications
Teaching
Brown University (1996-2010s)
- Electrical circuits
- Digital logic
- Computer architecture (grad/undergrad level)
- VLSI design (grad/undergrad level)
Starting in 2009 (to 2012)
- Introduction to engineering (freshmen level)
- Focused on statics/mechanics with a bit of design
Starting in 2016
- Looked for new opportunities to increase student diversity in my upper-level classes.
- Wanted to increase opportunites for interdisciplinary design-oriented courses in curriculum

Design of Robotic Systems
- Emphasis on the design process
- Projects are open-ended, team driven
-
Students benefit from diversity:
- Mix of CS, engineering, visual arts, RISD students
- Learn from each and contribute a unique perspective and skill set.
- 40% women, more ethnic diversity
5 main projects:
- Motor control with a self-made H-bridge (from transistors)
- Embedded LED matrix demonstrating time multiplexing & address decoding
- 2-degree of freedom robot arm using PID control
- Signal processing through timing interrupts
- Final project that incorporates concepts from previous projects
Projects completed in teams of 3-4 students
- I assigned teams (to ensure diversity), except for the final project
- All projects included some creative component of team’s own choosing
- 1-2 weeks allocated to each project (5-6 weeks for final project)

The Robots Are Coming!
This course aims to augment existing artistic robots and design new dynamic interactive creations. Students enhance these robots with new mechanical, electrical, software, and artistic features while considering the uses of technology and its interaction within society. Students from diverse concentrations are encouraged to enroll.
Project #1: Split-flap display
- Students redesign THINK bot with split-flap messaging
Part 1: Design a single-character split-flap controller
- Topics explored: interrupt handlers, stepper motors, Hall effect sensors, 3D printing
- Multiple teams: 4-5 students/team. Each team consists of a diverse mix of students (gender, major, year)
- Design critique: Best features of each team’s design will be voted on and used for the full display
Part 2: Design an 8-character split-flap display
- Topics explored: SW communication protocols, CAD design, electrical system design, poetry and calligraphy
- 5 teams: SW, electrical, CAD, poetry, documentation & integration
- Team dynamics:Team deliverables and communication were critical to success of project

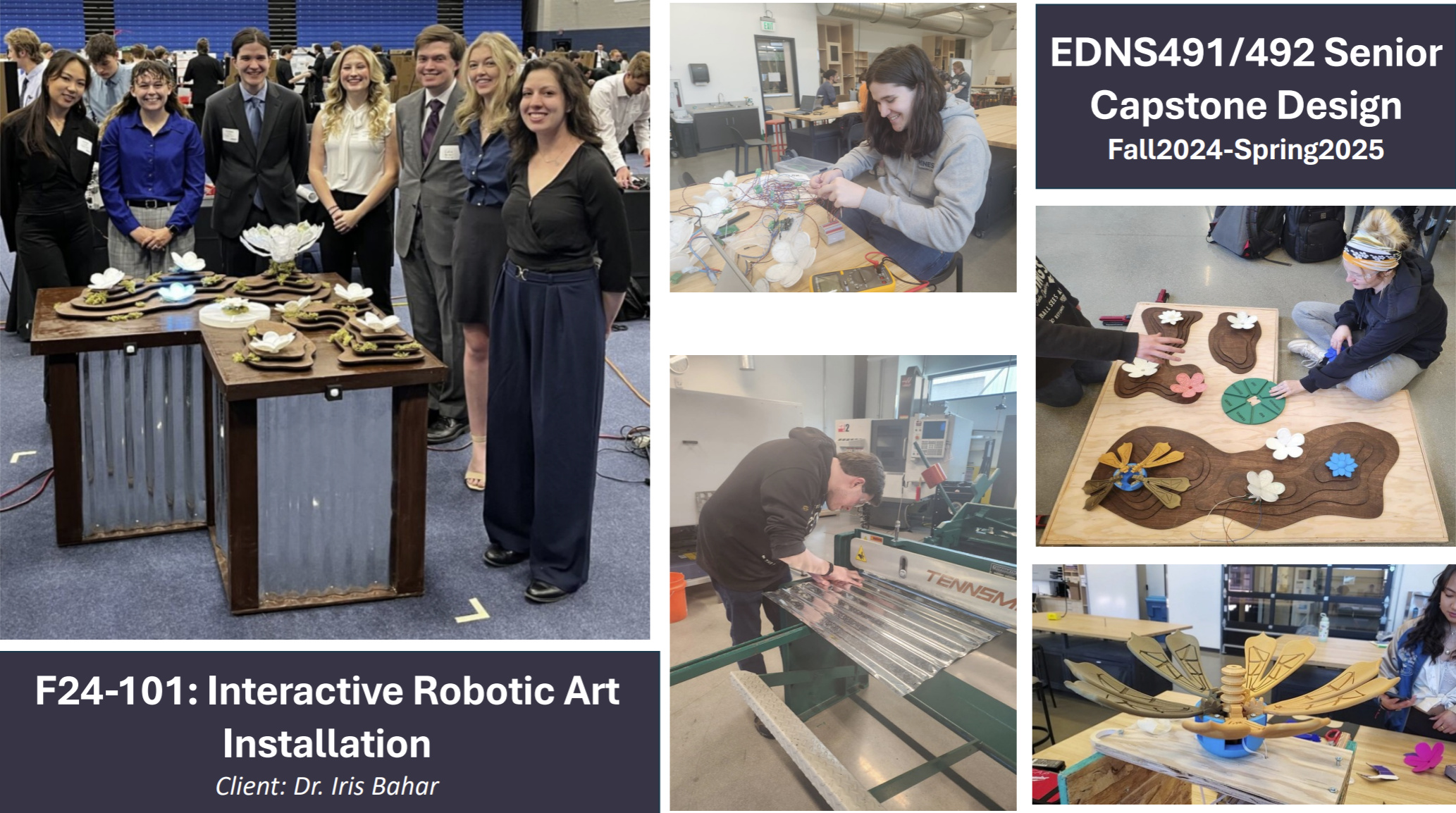
Senior Capstone
Prompt: Design an interactive robotic art installation that engages with people through light, sound, motion and prompts reflection on human interaction with robots in society.
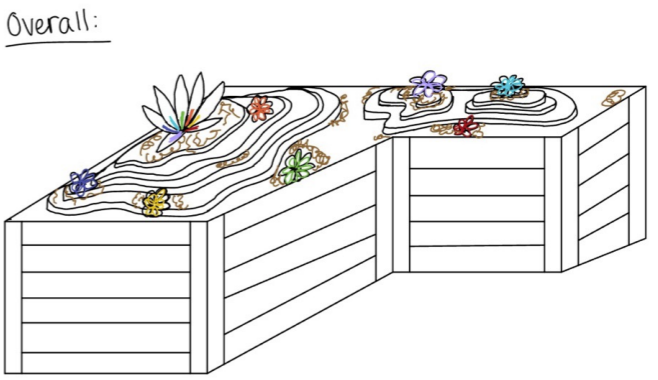
The Emotional Flowerbed
- Visitors interact with the installation, and it responds with motion, sounds, and light based on the collective emotional state of its users.
- Connects individuals through shared emotional expression while incorporating elements of engineering, design, and technology.
- Integrates mechanical movement, electronic control systems, and interactive software to create a seamless and immersive experience.